BallE Robot '17
Project Description
Team Members : Marwa AlAlawi, Fayed Ali, Amro AlSahreef, Enes Kocabey, Ihssan Tinawi
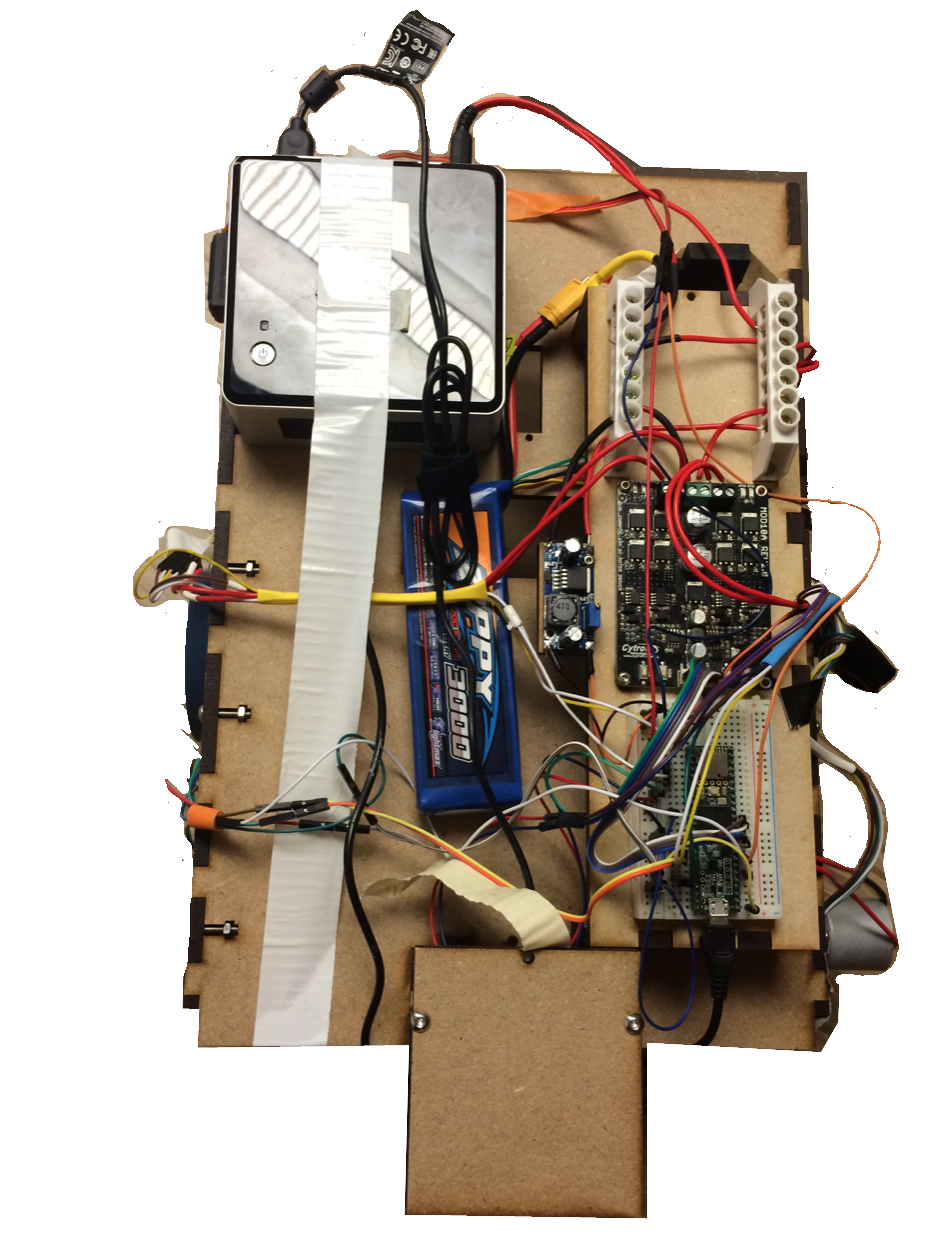
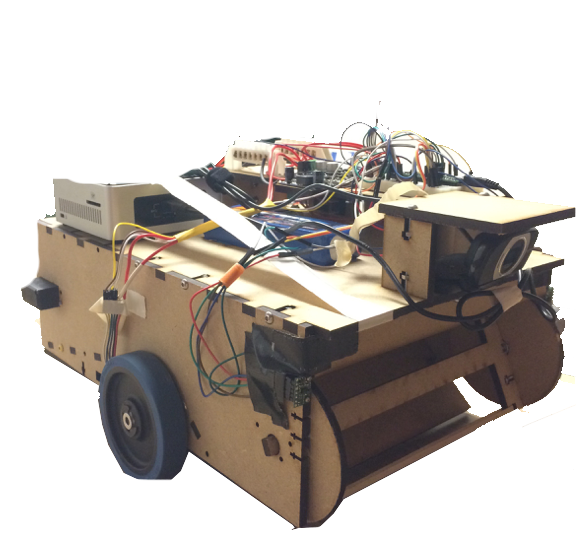
The Mobile Autonomous Systems LABoratory competition is an autonomous robotics competition held at MIT. During MASLAB, I worked in a team of five to design an autonomous robot. Our team’s robot is named Ball-E, after the robot “Wall-E”, because it is capable of autonomously collecting colored balls, sorting them according to color, and pushing them into goals while avoiding walls. Our team won first place during the mock competition, but placed 4th (out of 8 possible positions) because our time of flight sensors (distance sensors) crashed. I was mostly responsible for the electric engineering component (wiring, supplying needed voltage through step-down converters, soldering, adding pull-up resistors where needed) of the robot, as well as writing code for the RGB color sensor (to enable ball sorting). My code was written through the Arduino IDE, and I had to conduct a number of tests before acquiring accurate readings for red, blue and green colors at reasonable distances.
Project Keywords
- Arduino
- RGB Sensors
- Time of Flight Sensors
- Electrical Engineering
Project Gallery